Eigenmaps are important in analysis, geometry, and machine learning,
particularly in nonlinear dimension reduction. This project
investigates the relationship between eigen-coordinates of graph
Laplacians and Chebyshev polynomials. We will consider constructing
graph Laplacian operators on $[-1,1]$, $[-1,1]^2$, the sphere $S^2$,
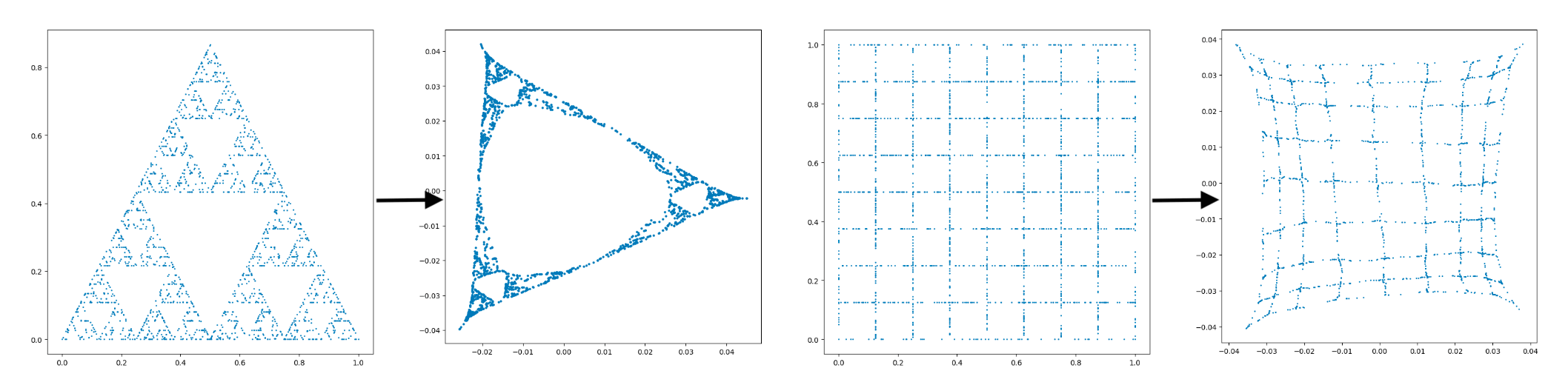
and the Sierpinski gasket. We also have explored these operators when
the points are selected randomly with various distributions, such as
uniform and Gaussian. We have developed algorithms capable of
generating eigenmap plots for the aforementioned sample spaces.
In our next step, we would also like to compare the eigen-coordinates
of graph Laplacian operators constructed from those intervals with
families of orthogonal polynomials, such as the Hermite polynomials
and possibly exceptional orthogonal polynomials. The paper is available on
the UConn REU website.
★Features:
- Studied eigenmaps of Laplacian matrices transforming high-dimensional data into graph representations.
- Use NumPy and Matplotlib to visualize the eigenmaps.
- Explored the properties of eigenmaps, including data distribution, manifold smoothness, and boundary conditions.
- Analyzed eigenmaps on structures including intervals, squares, torus, and the Sierpinski triangle, emphasizing their connections to orthogonal polynomials and optimal parameter choices.
★Skills: Python, MATLAB; NumPy.